|
全球工业制造业领域,提到非常多的就是产业转型,而在转型过程中,除了注重节能环保之外,自动化技术利用率的高低也是整个过程中的主流。
中国已成为工业机器人增长最快的国家之一。机器人对新兴产业发展和传统产业转型都有重要作用。
传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,机器人才具备了类似人类的知觉功能和反应能力。
采用电流传感器测量高压巡线机器人的夹紧力,是对电流传感器用法的一种全新尝试,下面介绍下HKA50-霍尔小电流传感器在巡线机器人中的应用。
整个电流传感器测力系统由直流驱动电机、电流传感器、模拟/ 数字转换(A/ D)模块、控制器及传动与夹紧机构组成,如图2 所示。
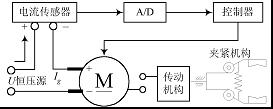
图2 系统构成简图
由式(4) 可知,夹紧力F 与电机工作电流I g 成线性关系。用电流传感器测出电机的工作电流I g , 通过标定即可转换为相应的夹紧力F。
根据上述方法,选用HKA50-P霍尔电流传感器,原边电流测量范围- 5~5 A ,副边额定输出电压4 V ,安装在一台220 kV 沿相线巡线机器人实验样机上。通过带电运行实验,测得电流传感器在夹紧过程中的输出如图3 所示。
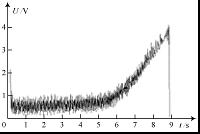
图3 电流传感器输出
由于机械摩擦阻力矩随传动机构的运动而变化,电流传感器的输出有振动现象,需要进行相应的软件滤波处理,以保证夹紧效果。采用连续多次判断采样电流大于阀值的方法即可方便地滤除干扰,如图4 所示。
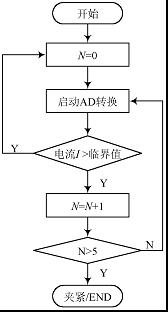
图4 软件滤波流程图
通过霍尔电流传感器在机器人中的夹紧力的测量,更为精确,也使得机器人更为完美。 |
